Rylan Schaeffer

Resume
Research
Learning
Blog
Teaching
Jokes
Kernel Papers
Cheatsheet - Self-Supervised Learning for Vision
by Rylan Schaeffer
| Method | Latent Dim | Batch Size | Optimizer | Learning Rate | Weight Decay | Scheduler | Epochs |
|---|---|---|---|---|---|---|---|
| SimCLR | 128 | 4096 | LARS | 4.8 | 1e-6 | Linear Warmup, Cosine Decay | 100 |
| TiCo | 256 | 4096 | LARS | 3.2 | 1.5e-6 | Linear Warmup, Cosine Decay | 1000 |
| VICReg | 8192 | 2048 | LARS | 1.6 | 1e-6 | Linear Warmup, Cosine Decay | 1000 |
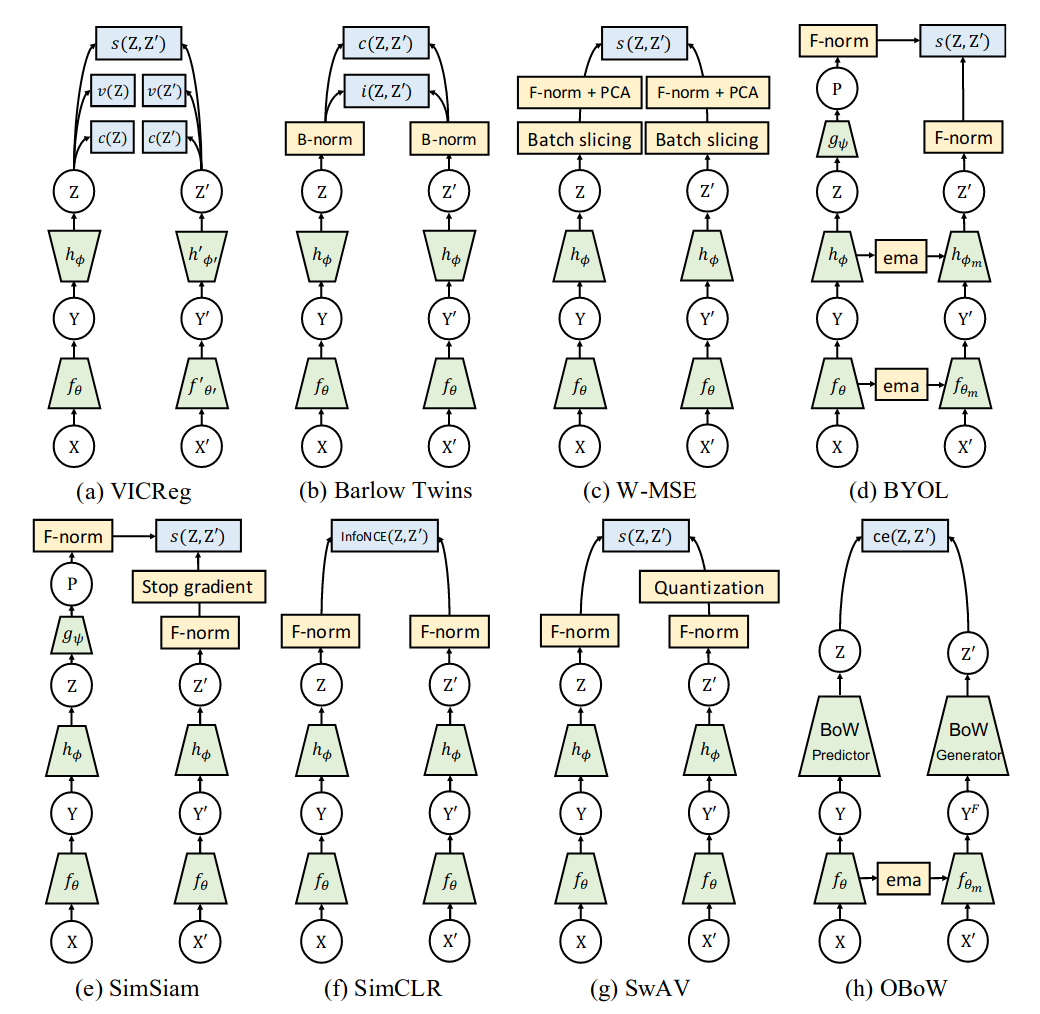
Figure from VICReg (ICLR 2022):
CPC (Arxiv 2018)
Deep InfoMax (DIM) (ICLR 2019)
AMDIM (NeurIPS 2019)
MoCo (CVPR 2020)
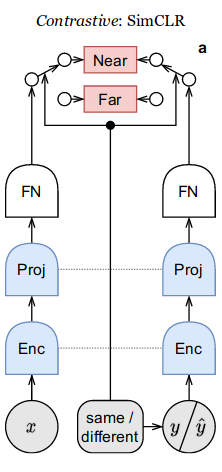
SimCLR (ICML 2020)
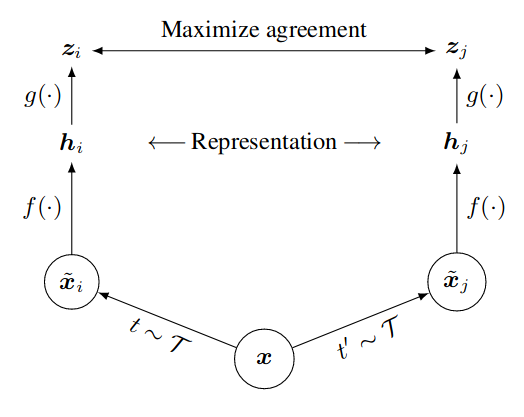
- 3 data augmentations, applied sequentially: random cropping, random color distortions, random Gaussian blur
- Base encoder \(f(\cdot)\)
- Projection head \(g(\cdot)\); specifically use a 1-hidden-layer MLP
- Normalized temperature-scaled Cross Entropy (NT-Xent) loss:
- Uses only augmented data in the batch
- No projection significantly hurts performance; why?
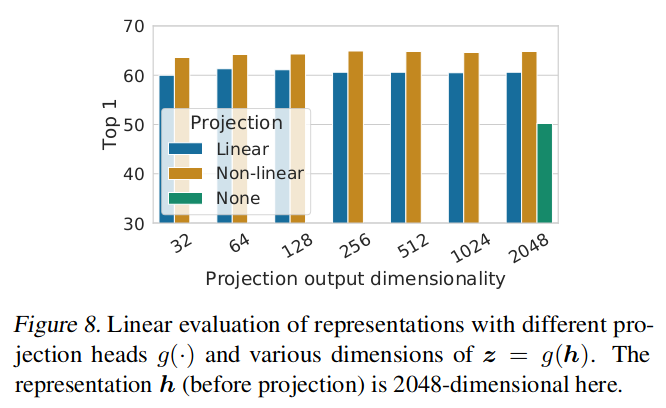
- Paper claims that using \(h_i\) rather than \(z_i\) is better, but I don’t see in what sense, or where the evidence is?
- NY-Xent loss outperforms logistic loss and margin loss
- Another nice graphic from TiCo
SwAV (NeurIPS 2020)
BYOL (NeurIPS 2020)
SimSiam (CVPR 2021)
- No negative sample pairs, no large batches, no momentum encoders
W-MSE
-
Whitening Mean-Squared Error
- Criticism: matrix inversion is slow and possibly numerically unstable
- Criticism: Whitening operator is estimated over multiple batches, and may have high variance
TiCo (Rejected at NeurIPS 2021)
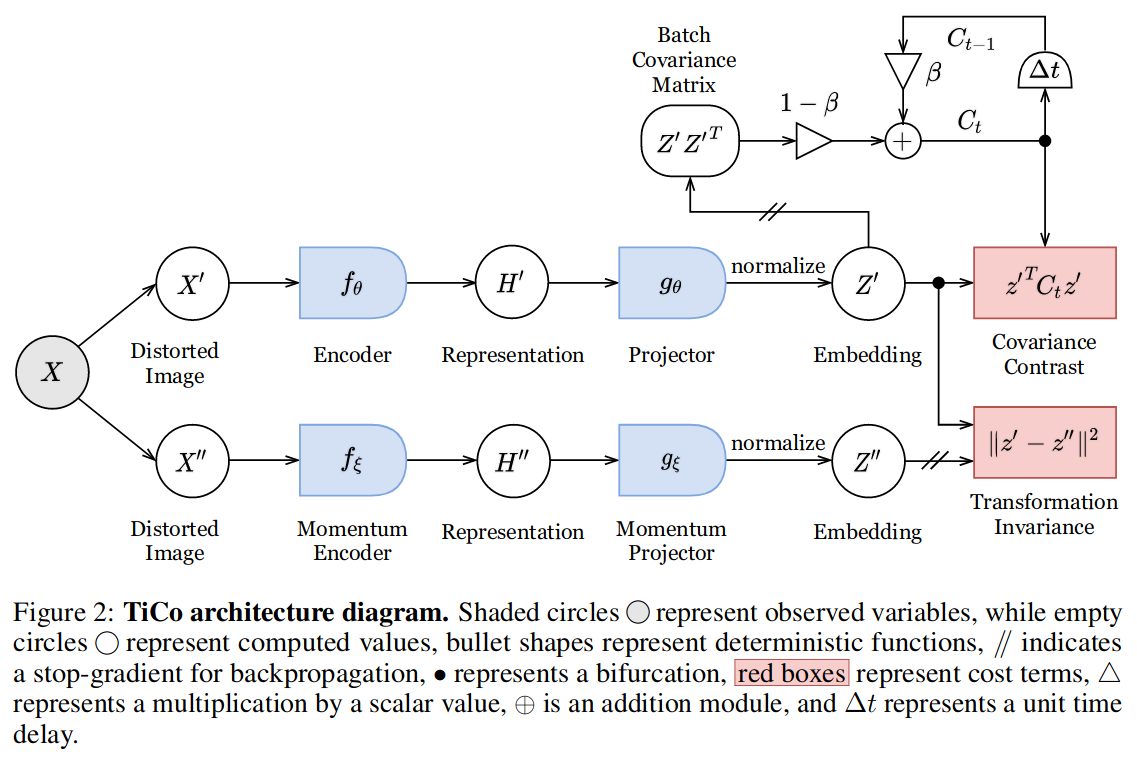
- Loss has 2 terms: transformation invariance and covariance contrast
where \(C_t\) is the second moment matrix of the representations.
Equivalently:
\[\ell = -\frac{1}{N} \sum_n z_n^{'} \cdot z_n^{''} + \frac{\rho}{N^2} \sum_{ij} (z_i^{'} \cdot z_j^{''})^2\]- TiCo is both a contrastive and redundancy reduction method
- The covariance contrast loss incentivizes (transformations of) different data to be orthogonal
- The covariance contrast loss can also be viewed as regularizing the Frobenius (matrix norm) of \(\frac{1}{N} Z_{F}^T Z_F\) where \(Z_F\) is the \(N \times F\) matrix of normalized features
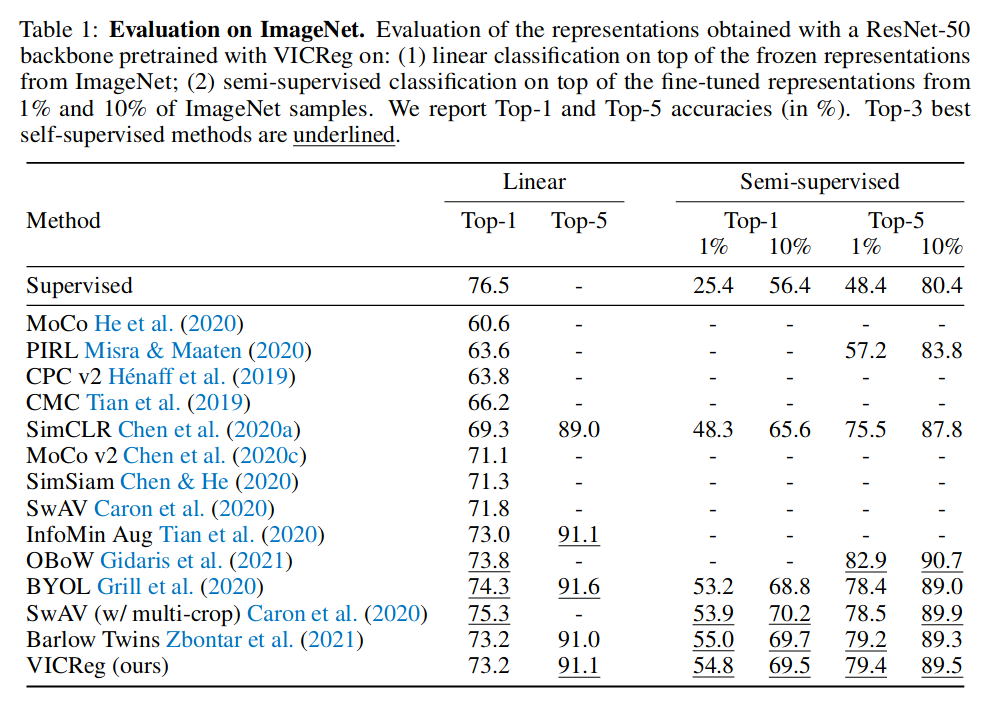
VICReg (ICLR 2022)
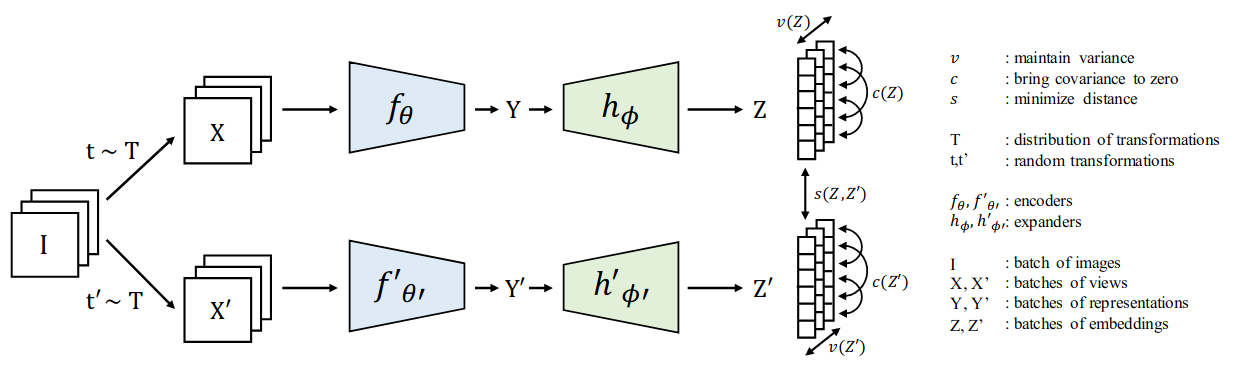
- VICReg = Variance-Invariance-Covariance Regularization
- Avoids collapse by (1) maintaining variance of each embedding dimension above a threshold and (2) decorrelating each pair of variables
- Invariance loss:
- Variance regularization loss:
where $S(x, \epsilon) = \sqrt{\mathbb{V}[x] + \epsilon}$
- Using the standard deviation, not the variance, is critical for ensuring the gradient isn’t too small
- Covariance regularization loss:
- Encourages off-diagonal elements of covariance to be close to 0
- Decorrelation at embedding level had a decorrelation effect at the representation level
- Standardization of embeddings hurts performance very slightly (0.2%), but removing standardization in the hidden layers hurts performance (1.2%)
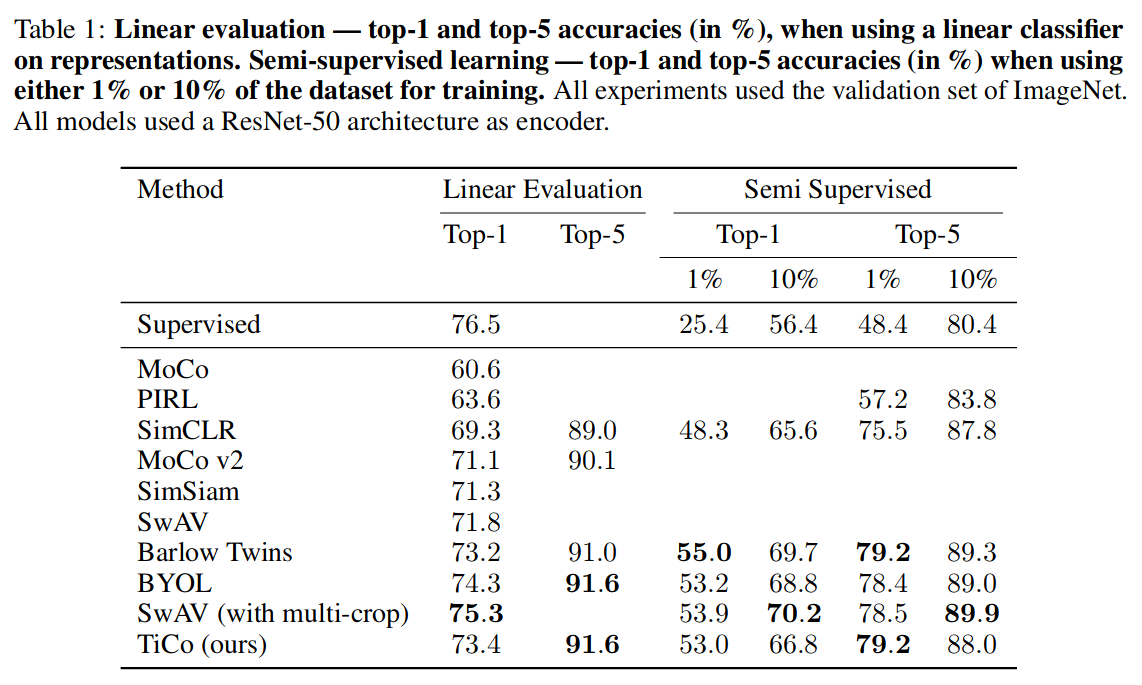
- Results: